Abstract
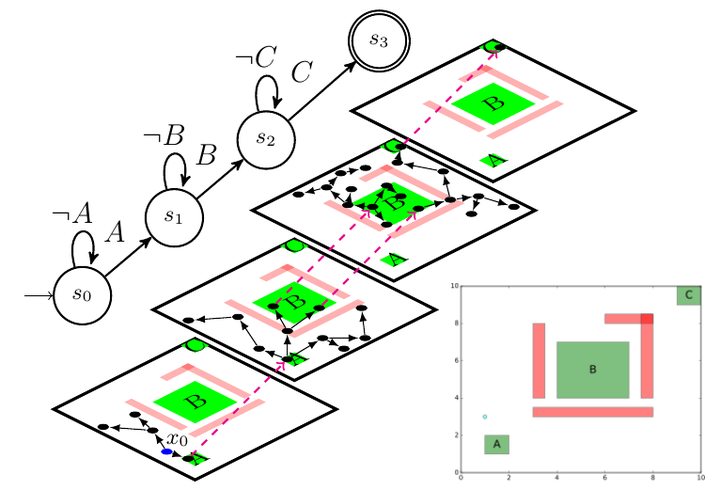
In this paper, we focus on robot motion planning from timed temporal logic specifications. We propose a sampling-based algorithm and an associated language-guided biasing scheme. We leverage the notion of temporal relaxation of time-window temporal logic formulae (TWTL) to reformulate the temporal logic synthesis problem into an optimization problem. Our algorithm exhibits an exploration-exploitation structure, but retains probabilistic completeness. Moreover, if the problem does not have a solution due to time constraints, the algorithm returns a candidate path that satisfies a minimally relaxed version of the specification. The path may inform operators about timing problems with the specification or the system. We provide simulations to highlight the performance of the proposed algorithm.
Francisco Penedo Álvarez
PhD Systems Engineering
My research interests include formal methods, temporal logics and optimization.